
How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum
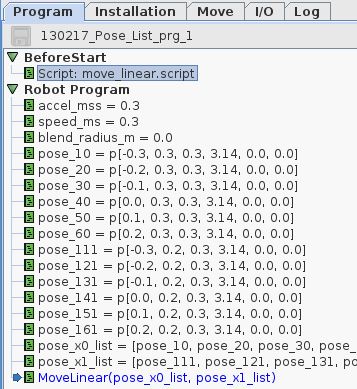
Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to

Cylons - Wikipedia
UR Programming Functions: – UR Forum-Help-Q&A

Pick and Place with model change - General Application Help: How do I? - Universal Robots Forum

ActiNav System Automates Flexible Machine Loading

5 robotics predictions for 2023
Manual Viewer - FRC Q&A

Problem with getUserDefinedRobotPosition / joint positions - Technical Questions - Universal Robots Forum
UR Programming Functions: – UR Forum-Help-Q&A

Universal Robots UR10 & UR10e

Making the Case: The Dangers of Killer Robots and the Need for a Preemptive Ban

Uncategorised Archives - Climate Outreach

3D CAD Package Tips – Page 2









